A rack integrated system has been developed to solve the above problems. In the tracking integrated system, since the tracking mechanism is built in the CPV module, the CPV module can be installed on the fixed support used by the traditional PV module. Tracking integrated system can be roughly divided into beam control and micro tracking system. The beam control system is composed of beam control optical elements, fixed condensing optical elements and fixed photovoltaic cpv cells. The beam control element collimates the sunlight so that it is perpendicular to the condensing optical element (such as Fresnel lens), which collects the collimated sunlight into the cpv cell. A geometric spotlight ratio can reach 500 * one thousand. However, under such a concentration ratio, the system is often very complex and has high optical loss. Previous studies have proposed beam control CPV systems based on mirror, rotating prism and electrowetting. However, none of these have been implemented on the actual module scale. On the other hand, the micro tracking system consists of condensing optical elements and movable photovoltaic (PV) cells. The compact internal tracking mechanism integrated in the module moves the cpv cell to the focus, so as to maintain the focusing performance, i.e. optical efficiency. Dur et al. An advanced optical design using simultaneous multi surface (SMS) algorithm for micro tracking system with laterally moving Plano convex lens is introduced. Several micro tracking systems with laterally moving light guides have been studied.
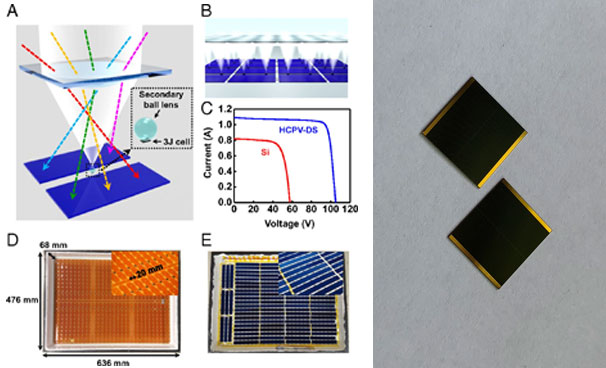
The module consists of microlens array, cpv cell array, compact tracking mechanism and shell. The lens aperture is hexagonal, the Fresnel loss is smaller than the quadrangular aperture, the lens array is an integrated structure, and therefore the alignment error is little . almost like the mechanism reported by Lim et al. The passive mode of mixing Z-direction tracking operation with XY direction tracking operation is adopted. This tracking mechanism only needs two actuators to understand three-axis tracking, so on reduce the value . The tracking mechanism consists of a plate fixed mount with a cpv cell array, a ball foot, a ball guide and an XY actuator. The diameter of the ball foot and therefore the curve of the ball guide determine the tracking track of the cpv cell. Because the module is fixed, the concentrator system needs a good receiving angle. additionally , the change of the main target spot position relative to the change of the incident angle must be smooth and continuous. during this study, we use the biconvex aspherical lens which has been widely utilized in various optical instruments, and verify the performance of the concentrator system. The secondary optical element is typically connected to the cpv cell within the traditional high concentration CPV to expand the acceptance angle, which isn't considered during this study to stay the optical system as simple as possible.